系统说明
使用机器人取代传统人力与固定式的控制机构,并重新思考、设计整体制造分析等流程。
系统目的
降低操作人员的工安危害
藉由更弹性的系统架构与设备配置规划,与客制化的控制逻辑,提升整体产线效能
系统功能
可以产业特性选择适合之机械手臂控制方案(PC、PLC或手臂控制器)进行流程控制
配合产线或实验室需求,客制化各种硬设备与配合之控制软件
整合各系统设备,进行自动排程规划与流程控制
与上位系统(SPC、ERP、LAB等)系统衔接,接收或抛送系统所需数据
实时流程Tracking的显示与工单控制
警报、历史数据查询、时光回朔等功能供用户便于维护
系统架构与特色
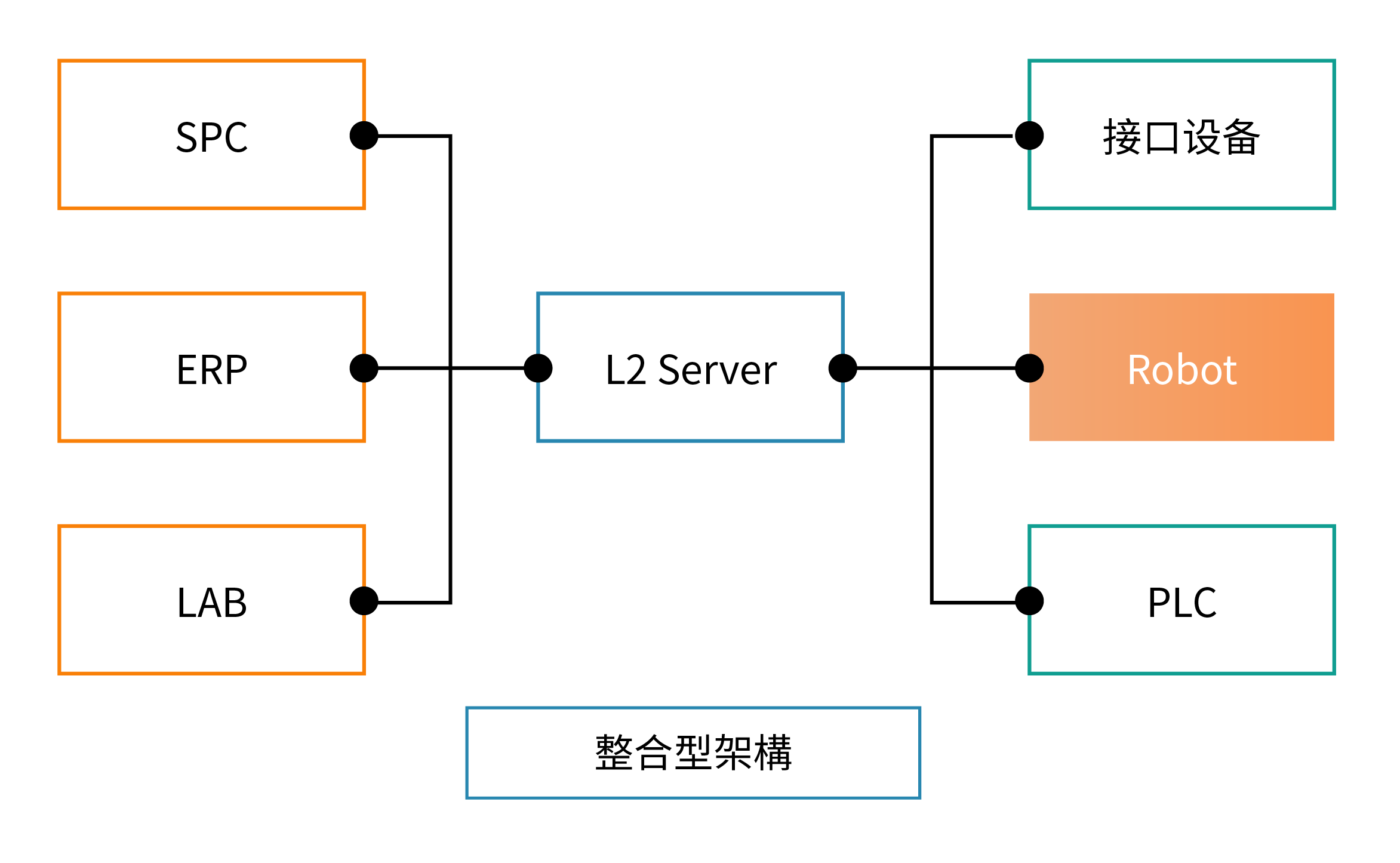
整合型架构: 整合自上游(LAB、ERP等)L3系统,传送样品/订单相关信息至L2 Server后,依据各设备实时状态及分析/生产需求,进行路径规划,并控制下游Robot及相关设备执行对应作业
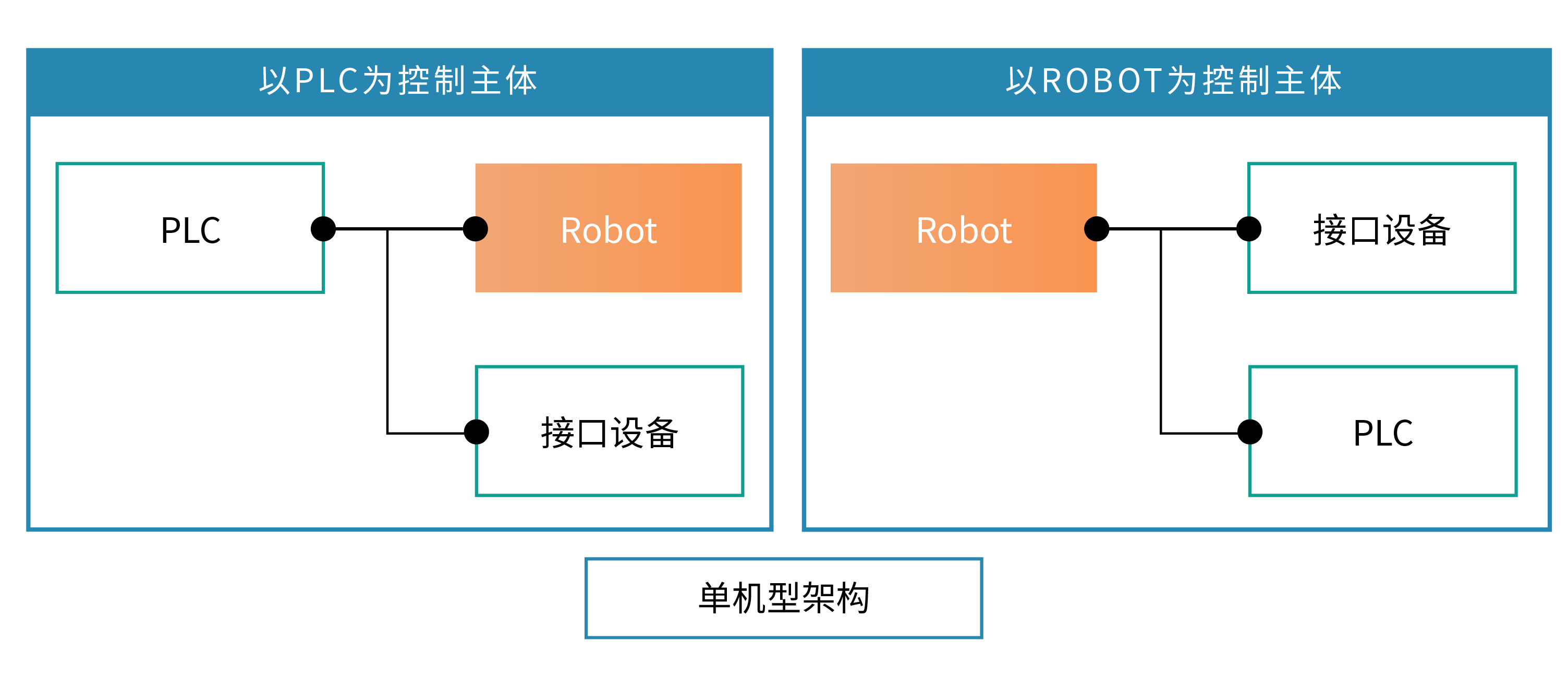
单机型架构: 适用于较小型的系统,可使用PLC作为流程控制主体,进行接口设备与Robot的控制。也可直接使用Robot作为控制器。对上仍可接受外部系统进行PDI/PDO数据的存取进行交握控制。